




2024年实时操作系统同步机制详解与操作指南

一、背景介绍
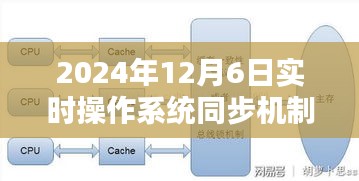
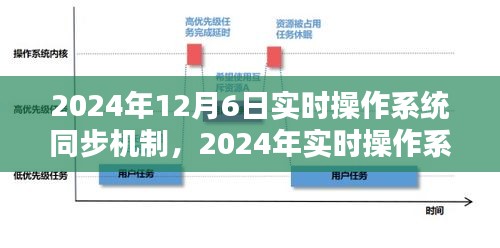
随着信息技术的飞速发展,实时操作系统(RTOS)在嵌入式系统、工业自动化等领域扮演着至关重要的角色,同步机制作为实时操作系统中的核心组成部分,确保系统资源得到合理、有序地访问,从而避免数据竞争和死锁等问题,本文将针对初学者和进阶用户,详细介绍如何在2024年理解和应用实时操作系统的同步机制。
二、预备知识
在开始之前,你需要对以下概念有所了解:
1、实时操作系统(RTOS)基本概念。
2、进程/线程的基本概念。
3、并发编程中的基本问题,如数据竞争和死锁。
三、实时操作系统同步机制详解
1、互斥量(Mutex)
互斥量是一种最基本的同步机制,用于保护对共享资源的访问,当一个线程拥有互斥量时,其他线程无法访问该资源,一旦线程释放互斥量,其他等待的线程可以尝试获取。
步骤:
(1)创建互斥量:使用RTOS提供的API创建互斥体对象。
(2)锁定互斥量:在访问共享资源前锁定互斥量。
(3)解锁互斥量:访问完共享资源后解锁互斥量。
示例代码(伪代码):
// 创建互斥量 create_mutex(my_mutex); // 锁定互斥量访问共享资源 lock_mutex(my_mutex); // 执行共享资源操作... unlock_mutex(my_mutex); // 解锁互斥量
2、信号量(Semaphore)
信号量用于控制对有限资源的访问数量,它允许一定数量的线程同时访问共享资源,超出数量的线程则需要等待。
步骤:
(1)创建信号量并初始化可用资源数量。
(2)请求资源:当线程需要访问资源时,通过信号量进行请求,如果资源可用则继续执行,否则等待。
(3)释放资源:使用完资源后释放信号量,允许其他线程获取资源。
示例代码(伪代码):
```pseudo
// 创建信号量并设置可用数量为N
create_semaphore(my_semaphore, N);
// 请求资源
wait_semaphore(my_semaphore); // 如果资源不足则等待
// 执行共享资源操作...
signal_semaphore(my_semaphore); // 释放资源
```
3、条件变量(Condition Variable)
条件变量用于在特定条件下唤醒一个或多个等待的线程,常用于实现更复杂的同步逻辑。
步骤:
(1)创建条件变量并与其互斥量关联。
(2)等待条件满足:线程在满足特定条件前等待在条件变量上。
(3)通知等待线程:当条件满足时,通过条件变量通知一个或多个等待的线程继续执行。
示例代码(伪代码): 省略具体实现细节,因为涉及复杂逻辑需要结合具体应用场景实现。
4.读写锁(Read-Write Locks) 读写锁允许多个线程同时读取共享资源,但只允许一个线程写入,适用于读操作远多于写操作的场景。 步骤: 获取读锁或写锁以访问共享资源,根据需求选择适当的锁类型,读锁之间不会相互阻塞,但写锁会阻塞所有读写操作。 5.其他高级同步机制 如屏障(Barriers)、事件标志(Event Flags)、消息队列等,用于实现更复杂的同步需求,这些机制需要结合具体应用场景和需求进行使用和设计。 四、操作步骤指南 1.熟悉RTOS文档和API:了解实时操作系统的基本功能和API调用方式。 2.理解任务模型:熟悉实时操作系统中的任务调度和优先级管理。 3.设计同步方案:根据应用场景和需求选择合适的同步机制进行设计和实现。 4.编码实践:结合具体应用场景编写代码实现同步机制。 5.调试测试:对编写的代码进行调试和测试,确保同步机制正确有效。 五、总结与展望 本文详细介绍了实时操作系统的同步机制,包括互斥量、信号量、条件变量等基本概念和使用方法,通过学习和实践这些同步机制,读者可以更好地理解和应用实时操作系统,提高并发编程的能力,随着技术的不断发展,新的同步机制和方法将不断涌现,读者需要保持学习,不断更新自己的知识体系以适应新的技术挑战。
转载请注明来自石家庄梦圆商贸有限公司,本文标题:《2024年实时操作系统同步机制详解与操作指南》





 蜀ICP备2022005971号-1
蜀ICP备2022005971号-1
还没有评论,来说两句吧...